
ENERTRIC
บริษัท เอ็นเนอร์ทริค จำกัด ก่อตั้งเมื่อปี พ.ศ.2553 ดำเนินกิจการในด้านการออกแบบ ติดตั้งระบบไฟฟ้า เครื่องกล รวมทั้งระบบออโตเมชั่น มีประสบการณ์และความเชี่ยวชาญในงานโรงไฟฟ้า โรงงานอุตสาหกรรม ปิโตรเคมี ทั้งยังเป็นตัวแทนผู้นำเข้าและจัดจำหน่ายอย่างเป็นทางการผลิตภัณฑ์ของ WEG มีความรู้ความชำนาญเกี่ยวกับมอเตอร์และ VSD ในงานอุตสาหกรรม โดยเน้นความน่าเชื่อถือ ความยืดหยุ่น และมุ่งเน้นความต้องการของลูกค้าอย่างต่อเนือง
![]()

สินค้าของเรา



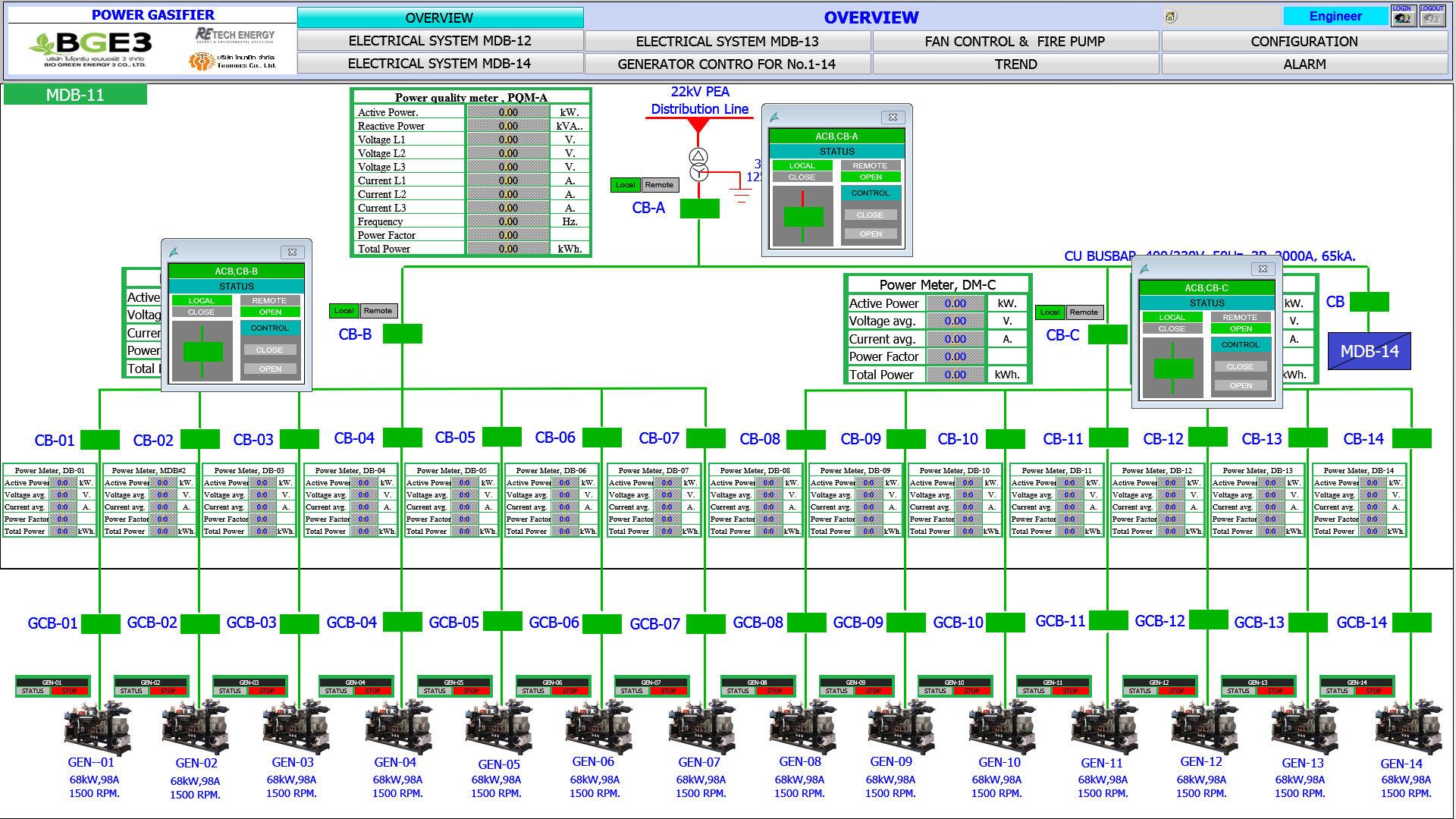
บริการของเรา


บุคลากรมีความชำนาญในการปฎิบัติงานเป็นอย่างดี
มีความรู้ ประสบการณ์กว่า 20 ปี
สื่อสารทำความเข้าใจกับลูกค้าอยู่เสมอ
พัฒนาความรู้ ความชำนาญให้ทันเทคโนโลยีตามยุคสมัย

ผลงานที่ผ่านมา
 Hongsa
Hongsa df
df df
df fd
fd fdfd
fdfd
 line ID :
line ID :